E-mail:

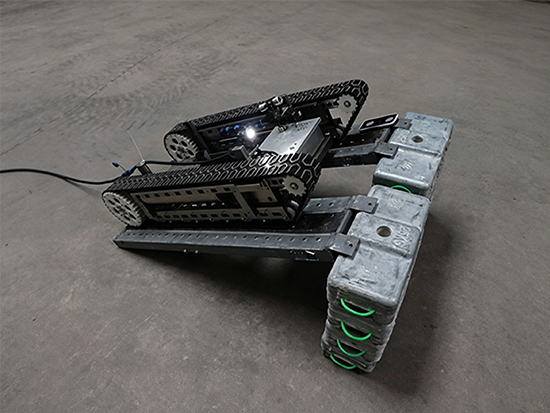
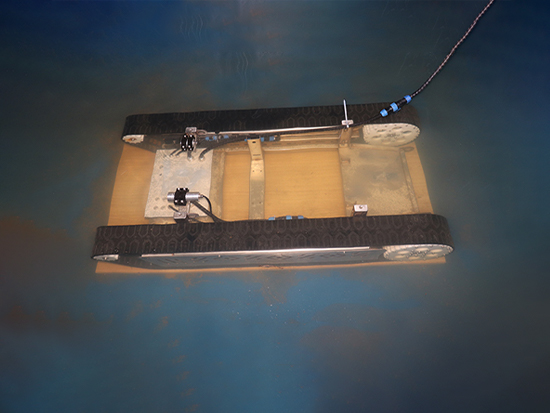
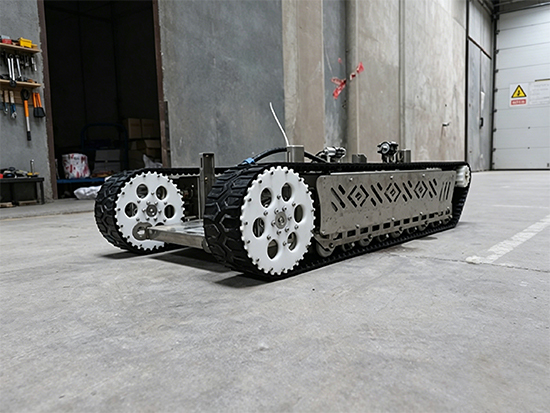
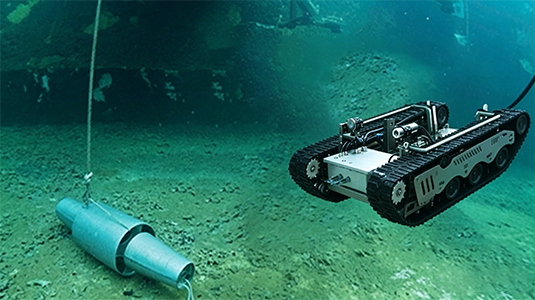
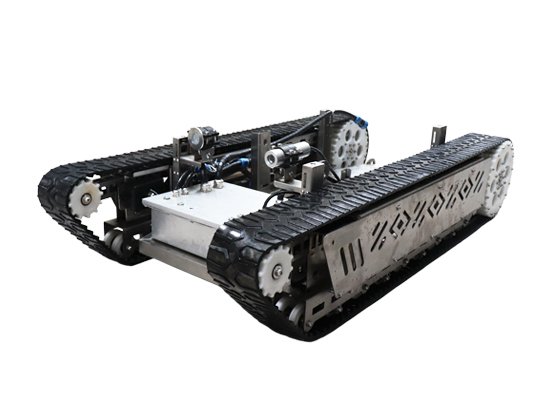
Underwater dredging robot

Underwater dredging robot

Oil-filled motors, IP68 waterproof, for maximum 50m depth underwater operations

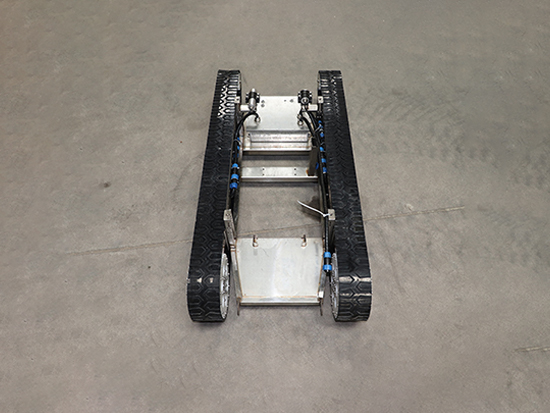
Main control box

Main control box

Power system: Battery/generator/ 380V AC power
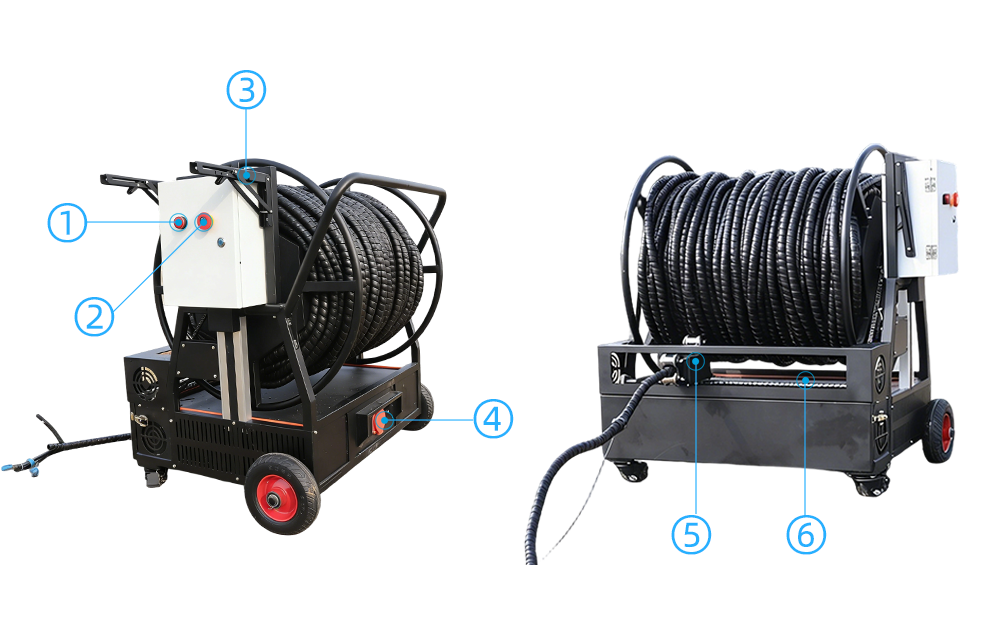
Optional:





| Item | Data | Item | Data |
| Dimension | 630*400*120mm | Track Width | 80mm |
| Motor Rated Power | (400W)*2 | Motor Rated Speed | 3000r/min |
| Ground clearance | 30mm | Speed | 4Km/h |
| Climbing ability | 30° | Self weight | 35Kg |
| Gear ratio | 1:100 | Output Torque | 50NM |
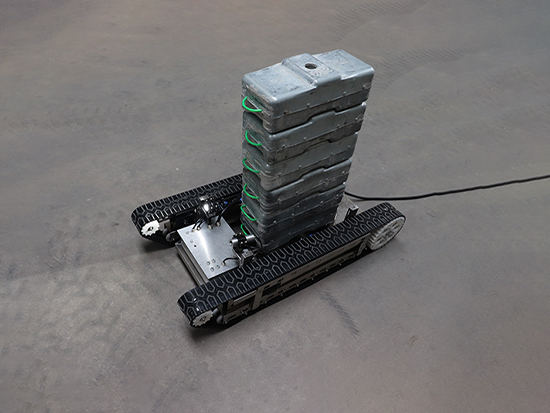
| Payload | 40Kg | Waterproof | IP68 |
| Maximum Underwater Depth | 50M ( can be customized for 300m depth underwater) | Drive Wheel Material | 304 Stainless Steel |
| Characteristics | ||
| Control characteristics | Way to control | Speed control (PV), position control (PP), IP, CSP, CSV, CST |
| Support motor | Waterproof AC torque motor | |
| Vehicle control accuracy | ±0.1m | |
| Speed control accuracy | ±0.05m/s | |
| Communication Interface | Modbus485 | Standard ModBus protocol |
| CanOpen | Standard CanOpen protocol, CiA301/402 | |
| EtherCAT | no | |
| Encoder type | Encoder port | 2500P/R |
| Ambient temperature | -20℃—50℃, use derating when it is higher than 40℃ | |
| Altitude | 30 meters underwater, derating for use above 1000m | |
| vibration | Less than 0.5G (4.9m/s2), less than 10Hz | |
| Storage temperature | -40℃—70℃ | |