E-mail:





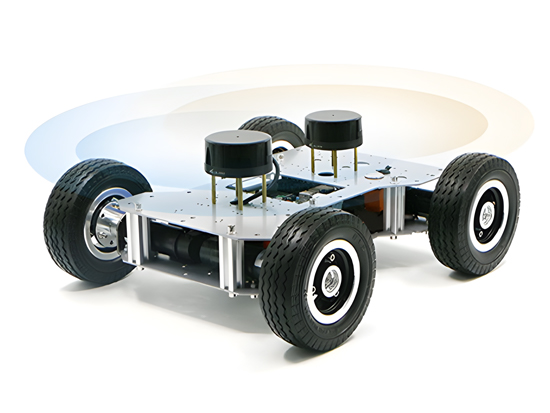

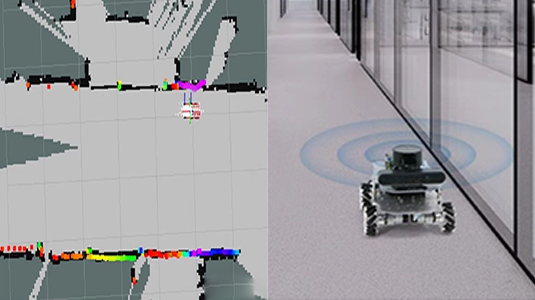
360° Omnidirectional Laser Scanning
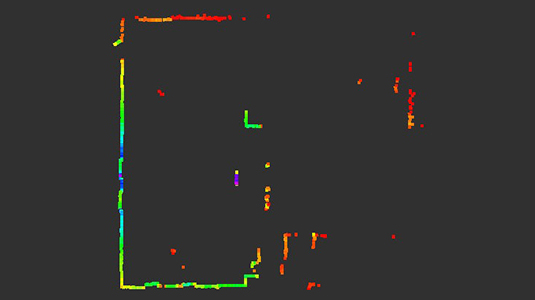
enabling higher positioning accuracy and better mapping performance.

Indoor & Outdoor universal
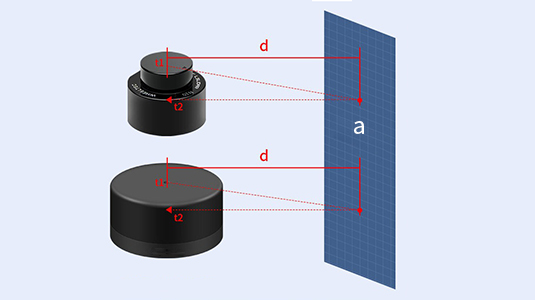
Advanced ToF Ranging Principle for the Entire Series
d: Distance from LiDAR to the target a
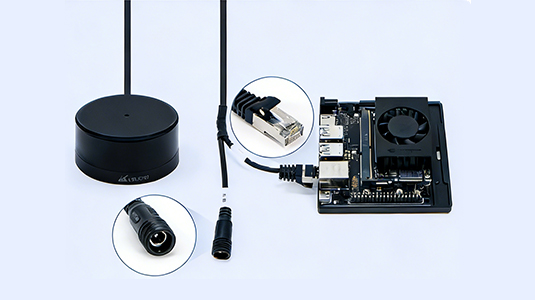
L-M1P-PHY Industrial-Grade Ethernet LiDAR

Full Support for ROS2
Enhanced Glass Recognition

Optional Ethernet Conversion Module, which is faster than serial port transmission.

USB Plug-and-Play
L-N1 Series Supports Light Intensity Data Output
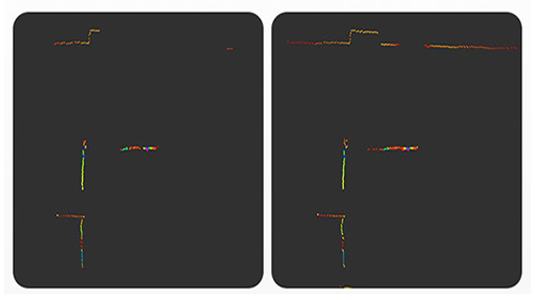
L-N1P LiDAR Supports Dual Echo, resulting in more complete scanning performance.

L-M1 Series Supports IP65 Waterproof Protection
Built-in Brushless Motor

Laser Safety: FDA Class 1

Supports Dual-LiDAR Fusion
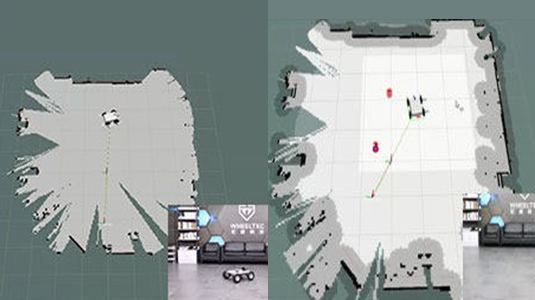
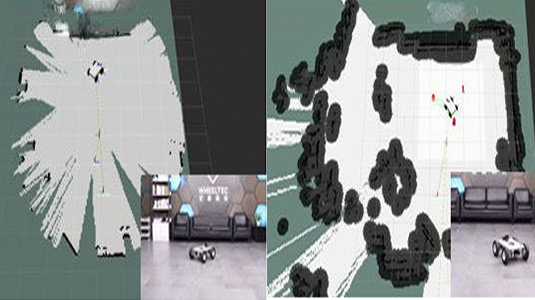
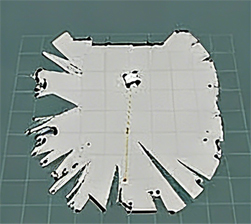
2D Mapping (Map Environment Reconstruction) and Navigation
LiDAR-Assisted Visual Mapping and Navigation

LiDAR Obstacle Avoidance

LiDAR Following



| Models | L-M1P/L-M1P-PHY | L-M1 |
| Type | short-range, medium-range | |
| Ranging Principle | ToF | |
| Application Scenarios | Indoor & outdoor universal | |
| Scanning Angle | 360° | |
| Output Data Resolution | 1mm | |
| Dimensions | Diameter 80*40mm | |
| Weight | Approximately 210g | |
| Measurement Accuracy | ±3cm | |
| Light Source | 905nm laser | |
| Min. Measurement Distance | 0.05m | |
| Ambient Light Immunity | 100KLux | |
| Data Content | Distance, Angle | |
| Power | 5VDC | |
| Measurement/Sampling Frequency | 20,000 times/s | 10,000 times/s |
| Angular Resolution | 0.22° | 0.36° |
| Scanning Frequency | 12HZ | 10HZ |
| Measurement Radius | White objects: 30 m; Black objects: 12 m | |
| ROS Support | ROS2/ROS1 | |
| WINDOW Support | Provided WINDOWS upper computer | |
| Driving Method | Built-in brushless motor | |
| STM32 Support | Supports STM32 data collection, provides data collection routines and STM32 single-chip microcomputer LiDAR obstacle avoidance code |
|
| Python Support | Supports data collection with Python 2.7 and Python 3.0 routines (compatible with Windows and Ubuntu environments) |
|
| Ambient Temperature | Operating: -10℃~50℃; Storage: -40℃~80℃ | |
| Protection Rating | IP65 | |
| Communication Interface | Ethernet, standard serial port (Baud rate: 512,000 bps) |
Ethernet, standard serial port (Baud rate: 460,800 bps) |
| Power Consumption | Operating voltage: 5 V Operating current: 400 mA |
|
| Applications | 2D map reconstruction, real-time navigation and obstacle avoidance, cleaning robots, sweeping robots, scientific research and education | |
| Models | L-N1P | L-N1 | |
| Type | short-range | ||
| Ranging Principle | ToF | ||
| Application Scenarios | Indoor & outdoor universal | Indoor | |
| Scanning Angle | 360° | ||
| Output Data Resolution | 15mm | ||
| Dimensions | Diameter 52*36.1mm | ||
| Weight | Approximately 58g | ||
| Measurement Accuracy | ±3cm@70% | ±3cm(0~6m); ±4.5cm(≥6m) (Target with 70% Reflectivity) |
|
| Light Source | 905nm laser | ||
| Min. Measurement Distance | 0.1m | ||
| Ambient Light Immunity | 60KLux | 30KLux | |
| Data Content | Distance, Angle, Light Intensity | ||
| Power | 5VDC | ||
| Measurement/Sampling Frequency | 5,400 times/s | 4,500 times/s | |
| Angular Resolution | Adjustable from 0.4°- 0.8° | Adjustable from 0.48°- 0.96° | |
| Scanning Frequency | Adjustable from 6HZ-12HZ | ||
| Measurement Radius | White objects: 25 m; Black objects: 11 m | ||
| ROS Support | ROS2/ROS1 | ||
| WINDOW Support | Provided WINDOWS upper computer | ||
| Driving Method | Built-in brushless motor | ||
| STM32 Support | Supports STM32 data collection, provides data collection routines and STM32 single-chip microcomputer LiDAR obstacle avoidance code |
||
| Python Support | Supports data collection with Python 2.7 and Python 3.0 routines (compatible with Windows and Ubuntu environments) |
||
| Ambient Temperature | Operating: -10℃~40℃; Storage: -30℃~70℃ | ||
| Protection Rating | --- | ||
| Communication Interface | Ethernet, standard serial port (Baud rate: 460,800 bps) |
Ethernet, standard serial port (Baud rate: 230,400 bps) |
|
| Power Consumption | Operating voltage: 5 V Operating current: 360 mA |
Operating voltage: 5 V Operating current: 180 mA |
|
| Applications | 2D map reconstruction, real-time navigation and obstacle avoidance, Commercial Robots, Service Robots, Autonomous Driving and education | ||